近年来,随着自动驾驶技术的快速发展,人工智能赋能的感知系统在自动驾驶系统中的作用愈发关键。为了加深我院师生对该领域前沿问题的理解,2025年6月6日,我院特邀英国拉夫堡大学航空与汽车工程系教授、香港理工大学机器人与自主系统讲席教授、低空经济研究中心主任Wen-Hua Chen(陈文华)教授,开展题为“AI Enabled Perception Systems in Autonomous Driving: Safety Implication and Control System Design”的讲座报告。陈文华教授专注于无人机与智能车辆技术的研发与应用,研究内容涵盖自动驾驶仪、态势感知、决策制定、系统验证、面向精准农业与环境监测的遥感技术等。近年来,他主持了英国EPSRC资助的控制理论前沿项目,聚焦于机器人与自主系统的新一代控制理论开发。

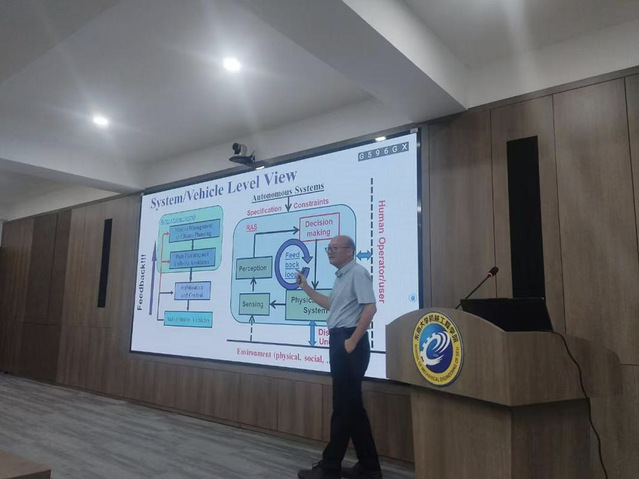
本次讲座吸引了众多师生参加,现场反响热烈。陈教授首先介绍了基于计算机视觉的感知系统在自动驾驶和其他自主系统中的重要作用。他指出,感知系统通过对图像数据的智能处理,为后续的决策制定和控制行为提供关键依据。然而,感知误差(包括随机误差、漏检、伪目标等)在系统层面可能引发严重后果,直接影响行车安全与系统性能。因此,全面理解和建模感知误差,分析其对系统安全性的影响,并提出相应的控制策略与缓解手段,具有重要的理论价值和应用前景。在讲座中,陈教授分享了团队在误差建模方面的初步研究成果,分析了感知系统中的漏检如何影响驾驶性能,并探讨了设计相应的控制与缓解策略有效降低其带来的安全隐患。同时,他强调,自动驾驶系统要在复杂动态交通环境中实现安全运行,计算机视觉与车辆控制两大研究领域需要加强协同合作,倡导引入“假设-保证”(assume-guarantee)这一契约式设计思想,从系统设计层面提升系统的安全性和可靠性。在讲座的最后互动环节,师生们踊跃提问,围绕感知误差的建模问题,端到端控制、学习类控制算法等问题与陈教授展开了深入交流。陈教授耐心解答,并给出了建设性的见解和建议。
本次讲座内容丰富、深入浅出,不仅拓宽了师生们在AI感知与安全控制领域的学术视野,也激发了大家对智能系统安全性设计的深入思考,为今后的科研学习带来了宝贵启发。

供稿:祝小元
审核:王乾乾



