近日,东南大学机械工程学院王乾乾教授与国际合作者在微集群操控领域取得重要进展,其研究成果以“Tracking and navigation of a microswarm under laser speckle contrast imaging for targeted delivery”为题发表在国际权威学术期刊Science Robotics上(论文链接:https://www.science.org/doi/10.1126/scirobotics.adh1978)。
自然界中生物体自发的群体行为,如蚁桥搭建、细菌菌落增殖、鱼群和鸟群的运动等,是生物体躲避天敌、趋利避害的有效途径。通过对自然界中生物体群体行为的仿生研究,科学家们通过不同的控制方式实现胶体颗粒在微观尺度下的集群控制。其中,磁控微机器人集群(magnetic microswarm)在生物医学领域展现出巨大的应用潜力,这主要得益于其优越的主动操控能力、增强的成像对比度和可调控的环境适应能力。目前,在血液循环系统中实现微集群的实时定位追踪仍具有挑战性,主要存在以下亟待解决的关键问题:快速变化的血流破坏微集群的稳定性,难以实现集群的可控运动;缺乏对真实生理环境下微集群状态的高精度实时反馈策略,无法及时调整微集群的控制参数;缺乏即时描绘复杂血管结构的大面积成像方式,难以实现微集群的长距离导航和追踪。
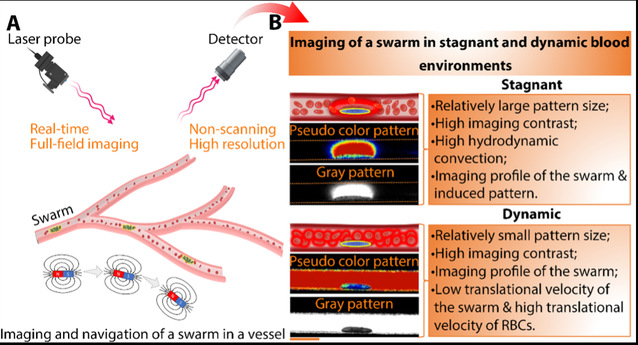
图 1. 基于 LSCI 的微集群实时追踪定位策略示意图
在前期工作的基础上(Q. Wang et al., Science Advances, 2021, 7, eabe5914),王乾乾教授与合作者提出一种基于激光散斑对比成像(laser speckle contrast imaging, LSCI)在静止和流动血液环境中实时追踪和导航微集群的策略。该策略使用Fe3O4@SiO2纳米粒子作为磁性微集群的基本构筑单元(building blocks),利用旋转磁场调控微集群的聚集行为,并实现贴近血管壁的集群导航。LSCI可以实时监测微集群和周围环境的相互作用,通过进一步分析图像信息,可实现复杂血管系统中微集群的实时追踪与导航。作者利用人体胎盘作为模型演示微集群在真实血管环境中的长距离导航能力。研究结果表明,该集群控制及追踪策略可以在人体胎盘血管中实现相对长距离(约400 mm)的集群连续导航。在大鼠股静脉活体模型验证实验中,得益于有效的控制策略,微集群在顺流和逆流导航过程中始终保持稳定完整的状态,且没有明显的颗粒损失。同时,股静脉中微集群的强成像对比度提高了导航精度,并进一步实现了活体内的高输送效率。总体而言,LSCI引导下的磁性微集群实现了体外和体内血管环境中的实时追踪和高精度导航,可在不同条件下定量评估微集群与血液环境的相互作用,并可以在较高流速条件下(平均流速55 mm/s)实现微集群的高效输送。本研究为微纳米机器人集群在血液循环系统中的主动靶向递送提供了有效的控制策略,有助于以微纳米机器人为基础的治疗平台的开发与临床应用。
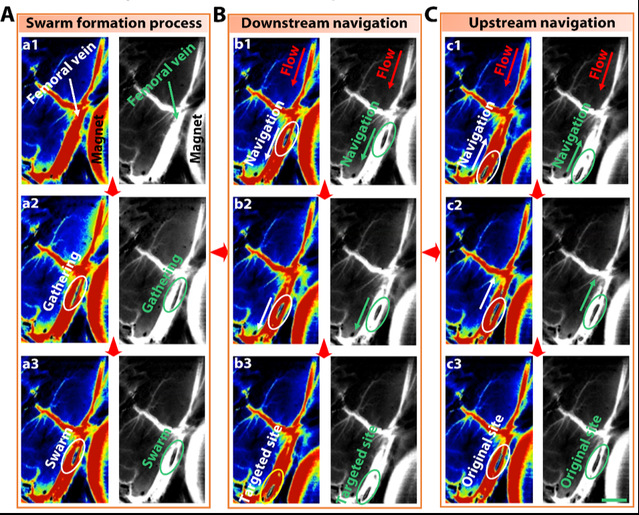
图 2. 活体实验鼠血管内微集群的实时追踪和导航
香港中文大学博士生王庆龙与东南大学机械工程学院王乾乾教授为论文共同第一作者,东南大学机械工程学院王乾乾教授、香港中文大学医学院Yiu Ming Ip教授和香港中文大学机械与自动化系张立教授为共同通讯作者。该工作同时收录于Science Robotics 特刊Magnetic robots for medical application中,并在该期刊主页高亮报道。该工作受到国家自然科学基金、江苏省基础研究计划和东南大学启动经费等项目的资助。